Template:Networking rutos manual serial utilities
Template:Networking rutos manual fw disclosure
Note: services were merged and moved to Serial Utilities page from FW version {{{series}}}_R_00.07.03.
Summary
The Serial Utilities page is used to make serial communication configurations of different types.
To make a new serial configuration instance select a serial type from the left-hand navigation menu. In the next page enter a custom name for the new config, select a serial device and click the Add button.
Example from the Modem Configuration page:
[[File:Networking_rutos_manual_serial_utilities_add_new_instance_default_{{{default}}}_v1.png|border|class=tlt-border]]
Then, click the Edit button next to the instance:
[[File:Networking_rutos_manual_serial_utilities_edit_config_default_{{{default}}}_v1.png|border|class=tlt-border]]
This manual page provides an overview of the Serial Utilities page in {{{name}}} devices.
Modem Control
The Modem serial type is used to manage modem functionality which could be accessed using shell interface. For this purpose you may want use CR/LF (Carriage Return, Line Feed) capable applications like PuTTY on Windows and microcom, minicom, cutecom or similar applications on Linux.
[[File:Networking_rutos_manual_serial_utilities_modem_control_default_{{{default}}}_v1.png|border|class=tlt-border]]
| Field | Value | Description |
|---|---|---|
| Enable | off | on; default: off | Turns the instance on or off. |
| Name | string; default: none | Instance name, generated by the user when first creating the configuration. |
| Device | ; default: | Specifies which serial port will be used for serial communication. |
| Baud rate | integer [300..3000000]; default: 9600 | Data rate for serial data transmission (in bits per second (bps)). |
| Data bits | 7 | 8; default: 8 | Number of data bits for each character. |
| Stop bits | 1 | 2; default: 1 | Stop bits sent at the end of every character allow the receiving signal hardware to detect the end of a character and to resynchronise with the character stream. Electronic devices usually use one stop bit. Two stop bits are required if slow electromechanical devices are used. |
| Parity | None | Odd | Even | Mark | Space; default: None | In serial transmission, parity is a method of detecting errors. An extra data bit is sent with each data character, arranged so that the number of 1 bits in each character, including the parity bit, is always odd or always even. If a byte is received with the wrong number of 1s, then it must have been corrupted. However, an even number of errors can pass the parity check.
|
| Flow control | None; default: None | In many circumstances a transmitter might be able to send data faster than the receiver is able to process it. To cope with this, serial lines often incorporate a "handshaking" method, usually distinguished between hardware and software handshaking. |
| Mode | Partial control | Full control; default: Partial control | Specifies modem control mode.
|
Console
Console mode requires no further configuration than the settings above and is used as a direct-access method to the device's shell interface. For this purpose you may want use such applications as PuTTY on Windows and microcom, minicom, picocom or similar applications on Linux.
[[File:Networking_rutos_manual_serial_utilities_console_default_{{{default}}}_v1.png|border|class=tlt-border]]
| Field | Value | Description |
|---|---|---|
| Enable | off | on; default: off | Turns the instance on or off. |
| Name | string; default: none | Instance name, generated by the user when first creating the configuration. |
| Device | ; default: | Specifies which serial port will be used for serial communication. |
| Baud rate | integer [300..3000000]; default: 9600 | Data rate for serial data transmission (in bits per second (bps)). |
| Data bits | 7 | 8; default: 8 | Number of data bits for each character. |
| Stop bits | 1 | 2; default: 1 | Stop bits sent at the end of every character allow the receiving signal hardware to detect the end of a character and to resynchronize with the character stream. Electronic devices usually use one stop bit. Two stop bits are required if slow electromechanical devices are used. |
| Parity | None | Odd | Even | Mark | Space; default: None | In serial transmission, parity is a method of detecting errors. An extra data bit is sent with each data character, arranged so that the number of 1 bits in each character, including the parity bit, is always odd or always even. If a byte is received with the wrong number of 1s, then it must have been corrupted. However, an even number of errors can pass the parity check.
|
| Flow control | None; default: None | In many circumstances a transmitter might be able to send data faster than the receiver is able to process it. To cope with this, serial lines often incorporate a "handshaking" method, usually distinguished between hardware and software handshaking. |
Over IP
The Over IP serial type is used to manage serial connections over a TCP/IP network.
Serial Device Configuration
Configure serial port communication parameters in the Serial Device Configuration section.
[[File:Networking_rutos_manual_serial_utilities_over_ip_serial_default_{{{default}}}_v2.png|border|class=tlt-border]]
| Field | Value | Description |
|---|---|---|
| Enable | off | on; default: off | Turns the instance on or off. |
| Name | string; default: none | Instance name, generated by the user when first creating the configuration. |
| Device | ; default: | Specifies which serial port will be used for serial communication. |
| Baud rate | integer [300..3000000]; default: 9600 | Data rate for serial data transmission (in bits per second (bps)). |
| Data bits | 7 | 8; default: 8 | Number of data bits for each character. |
| Stop bits | 1 | 2; default: 1 | Stop bits sent at the end of every character allow the receiving signal hardware to detect the end of a character and to resynchronise with the character stream. Electronic devices usually use one stop bit. Two stop bits are required if slow electromechanical devices are used. |
| Parity | None | Odd | Even | Mark | Space; default: None | In serial transmission, parity is a method of detecting errors. An extra data bit is sent with each data character, arranged so that the number of 1 bits in each character, including the parity bit, is always odd or always even. If a byte is received with the wrong number of 1s, then it must have been corrupted. However, an even number of errors can pass the parity check.
|
| Flow control | None; default: None | In many circumstances a transmitter might be able to send data faster than the receiver is able to process it. To cope with this, serial lines often incorporate a "handshaking" method, usually distinguished between hardware and software handshaking. |
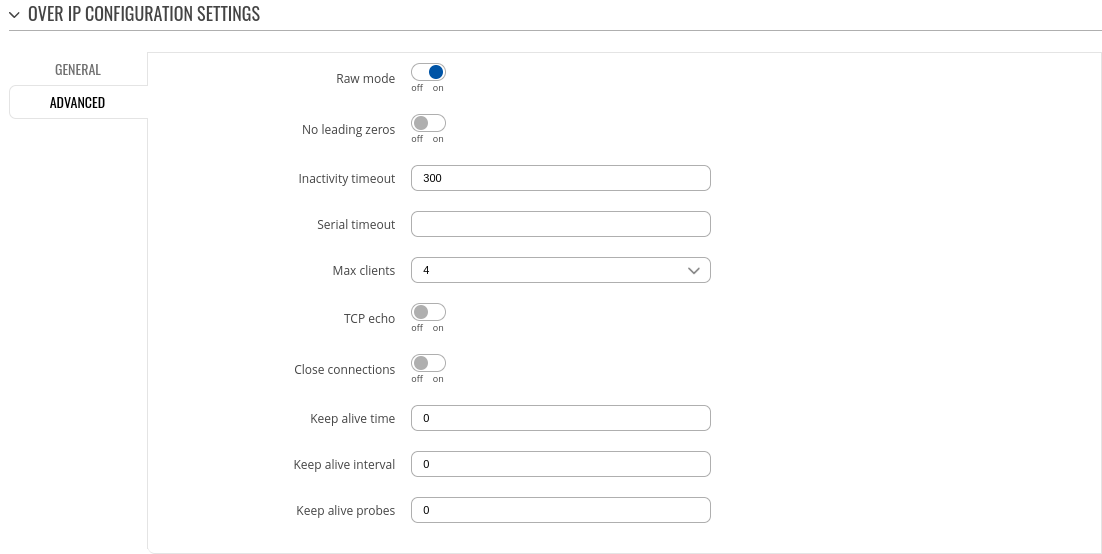
Over IP Configuration Settings
You can configure network related parameters of the serial connection in the Over IP Configuration secion.

| Field | Value | Description |
|---|---|---|
| Mode | Server | Client | Bidirect; default: Server | This device's role in the connection:
|
| Protocol | TCP | UDP; default: TCP | Protocol used in the communication process. |
| Listening port | [1..65535]; default: empty | When enabled, all data will be transmitted transparently. |

| Field | Value | Description |
|---|---|---|
| Raw mode | off | on; default: on | When enabled, all data will be transmitted transparently. |
| No leading zeros | off | on; default: off | When checked, indicates that the first hex zeros should be skipped. |
| Inactivity timeout | integer [0..36000]; default: 300 | Specifies period of time in seconds, where server connection must be inactive, to disconnect client. To disable timeout input 0. |
| Serial timeout | integer [0..1000]; default: none | Specifies the maximum milliseconds to wait for serial data. |
| Max clients | integer [1..32]; default: 4 | Specify how many clients are allowed to connect simultaneously. |
| TCP echo | on | off; default: off | Enable software TCP echo. |
| Close connections | on | off; default: off | Close TCP connections everytime data is sent or received (might result in serial data loss). |
| Kepp alive time | integer [0..32000]; default: 0 | Close TCP connections everytime data is sent or received (might result in serial data loss). |
| Kepp alive interval | integer [0..32000]; default: 0 | The interval between subsequential keepalive probes. |
| Kepp alive probes | integer [0..32000]; default: 0 | The number of unacknowledged probes. |
IP Filter
The IP Filter section is used for configuring which network is allowed to communicate with the device. You may add a new instance by selecting the Interface and pressing Add.

Then enter the IP address and save.

[[Category:{{{name}}} Services section]]